

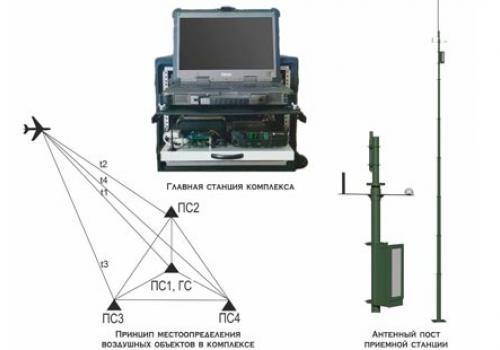

“Marker” range-difference system for location of air objects
“Marker” system is designated for detection, positioning and individual recognition of aerial civil and military objects by their IFF/SIF on-board transponder signals by range-difference method.
Main technical characteristics
|
No |
Parameter |
Value |
|
1 |
Received signals’ frequency, MHz |
1090 |
|
2 |
Synchronization of peripheral stations |
by GPS
|
|
3 |
Communication between the main and peripheral stations |
Ethernet (fibreoptics), wireless network |
|
4 |
Air object positioning error |
maximum 1 % of the air object range, depends on system topology |
|
5 |
Detection range for 10 km altitude of air objects (provided there is line-of-sight between the four peripheral stations’ antennas and the air object) |
350 km |
|
6 |
Detection range for 1 km altitude of air objects (provided there is line-of-sight between the four peripheral stations’ antennas and the air objects) |
100 km |
|
7 |
Individual air object recognition |
by air object transponder signals, w/o decoding in «S» mode |
|
8 |
Possibility of obtaining semantic information
|
in «A, С, S» modes |
|
9 |
Positioning military air objects through multilateration (provided there is line-of-sight between the four peripheral stations’ antennas and the air object) |
in «1, 2, 3, 4» IFF/SIF modes |
|
10 |
Positioning civil air objects through multilateration (provided there is line-of-sight between the four peripheral stations’ antennas and the air object) |
in «А, С, S» IFF/SIF modes |
|
11 |
Design version |
Transportable |
