


Комплекс обнаружения операторов мультикоптеров «Гроза-О»
Назначение
Автоматизированный поиск на местности и видеорегистрация операторов мультикоптеров.
Решаемые задачи:
обнаружение и пеленгование сигналов пультов управления мультикоптеров;
определение местоположения оператора мультикоптера путем пеленгования
сигналов пульта управления из нескольких точек пространства;
автоматизированный полет по пеленгу к оператору мультикоптера, фото и видеорегистрация оператора.
Способы применения
После обнаружения мультикоптера производится взлет управляемой летающей платформы на высоту 50-100 м, поиск и пеленгование сигналов пульта управления мультикоптера. Поиск оператора производится одним из двух способов:
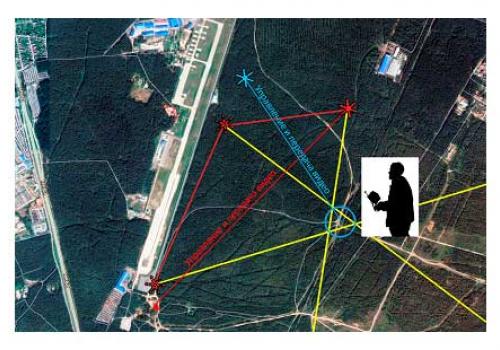
1. Местоопределение оператора угломерным методом
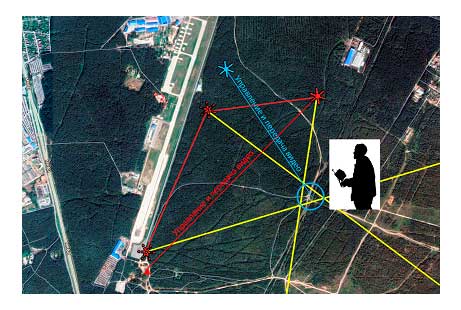
Летающая платформа производит пеленгование пульта управления из нескольких точек пространства. В точку пересечения пеленгов (место расположения оператора) направляется группа захвата.
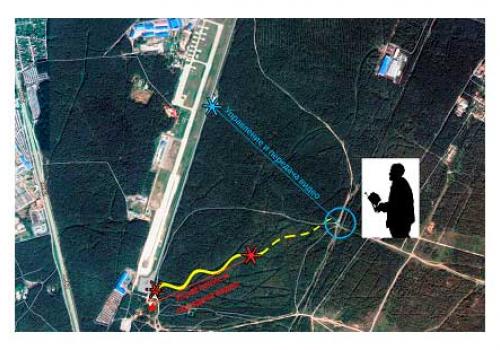
2. Поиск оператора по пеленгу

Летающая платформа осуществляет автоматизированный полет с выполнением колебательных маневров и постоянным пеленгованием пульта, визуальным поиском, видеорегистрацией действий оператора.
Тактические характеристики:
Диапазон частот обнаружения и пеленгования сигналов 900-6000 МГц
Точность пеленгования не хуже 5˚
Длительность полета до 30 минут
Дальность полета до 2 км
Дальность обнаружения пультов управления до 2 км
Время подготовки к взлету не более 3 мин
Формат видеозаписи до 1080p60
Габариты летающей платформы:
- в транспортном положении 600х700х600 мм
- в полете 1140х1140х600 мм
Полетная масса 10 кг
